Smart Stovetop Knob
SolidWorks | 3D Printing | Arduino Programming
Designed system in SolidWorks (part, assembly, mechanical toolbox)
Used Arduino, ESP8266 Wifi Module to control the NEMA 32 Stepper Motor, which drives the gear-belt system
3D printed gears and fabricated motor mount with bandsaws, secured with bolts&nuts
Programmed ESP8266 Wifi Module with Arduino code and web interface
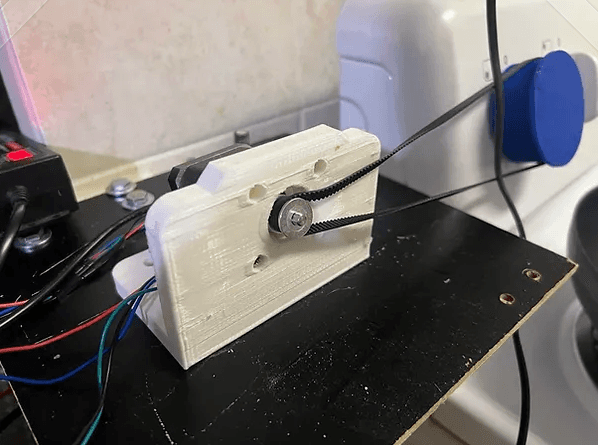
Knob that I will mount the smart knob on
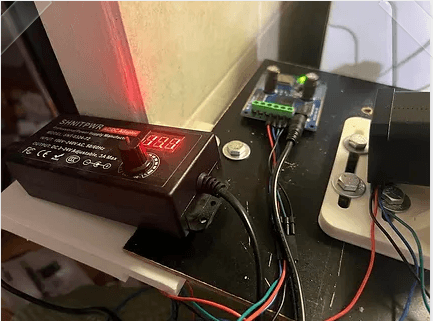
Back view (power supply, wifi stepper module, and motor mount)
3D Printed Gear (blue), which snug fits onto the existing stove knob; a timing belt connects the gear and the stepper motor


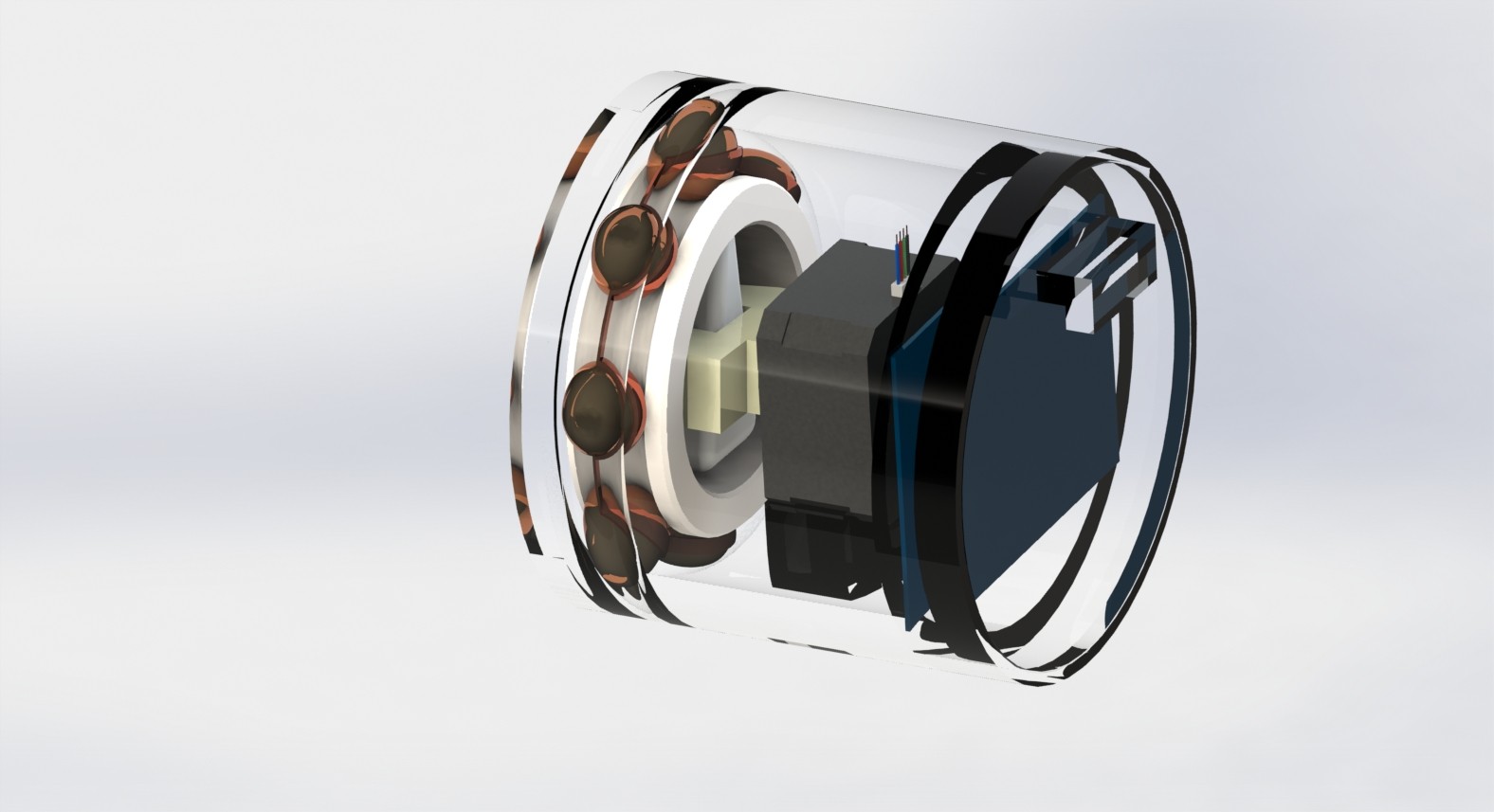
Iteration 2
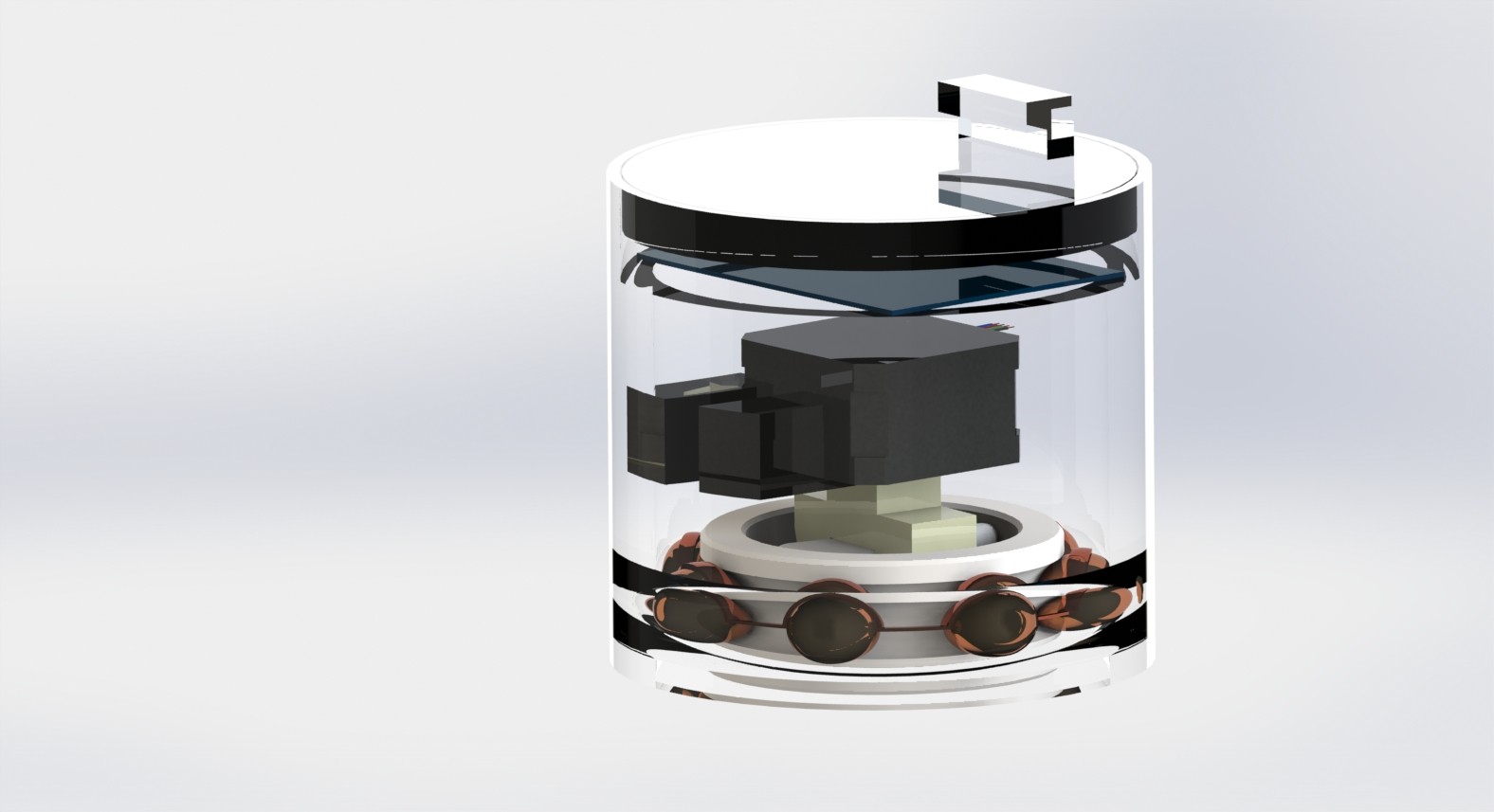
Isometric view of system
Results/Lessons Learned
Turned knob off remotely with 100% success rate
When designing for flexibility, we can design a slot opening instead of drilling screw holes in fixed positions. This way, we would be able to tighten the screw wherever needed (in the case that you don't need that strong of a joint).
Solidworks has many tool boxes - for example, the gear toolbox. This is a helpful tool to design gear systems (so that one does not have to design from scratch, like I did at the beginning of this project).
There's always a tradeoff between the strength of the 3D printed part and print time. When the part doesn't have a high load requirement, we can reduce the print time by removing material in certain regions that does not significantly reduce the part's ability to bear load. For example, in the white motor mount shown above, we can remove some material from the face near the slots. At the same time, sharp corners can perhaps removed to reduce stress concentrators (in this case it was fine because the part did not have to support a significant load).
I learned about what the different channels on a ESP wifi module (RX, TX, GND, and GPIO, etc...) and how to wire it with a stepper motor